Nicholas Verzic is a researcher, engineer, and software developer with B.S. degrees in Mathematics and Mechanical Engineering and a minor in Economics from the University of Texas at Austin. His work spans artificial intelligence, robotics, and computational modeling, integrating theoretical mathematical principles with real-world applications. With both academic and professional research experience at Meta, Hewlett Packard Enterprise, and NASA Ames Research Center, he has contributed to impactful projects in a variety of contexts. He also authored, co-authored, and orally presented publications in IEEE conferences on computer vision and sensor networks. This portfolio highlights his work in applied machine learning, automated robotics, and engineering design, reflecting a diligent and deliberate approach to problem-solving.
Creating This Portfolio
Given Nicholas’ experience in Unity game design, it made sense to build this portfolio as an interactive experience. The running theme of robotics and applied mathematics influenced the direction, as he designed all models and the kinematic system driving the robot manipulator. See the early stages of the development process below!
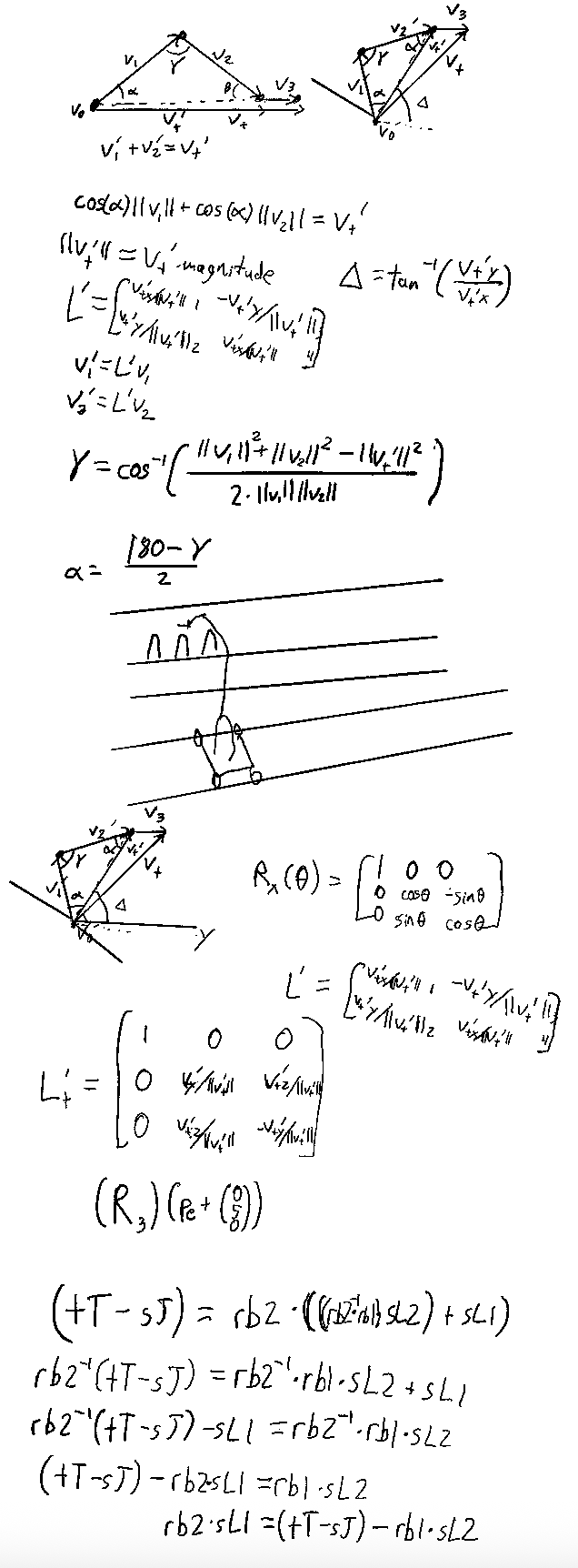
Scratch Work for the Robot Kinematic System
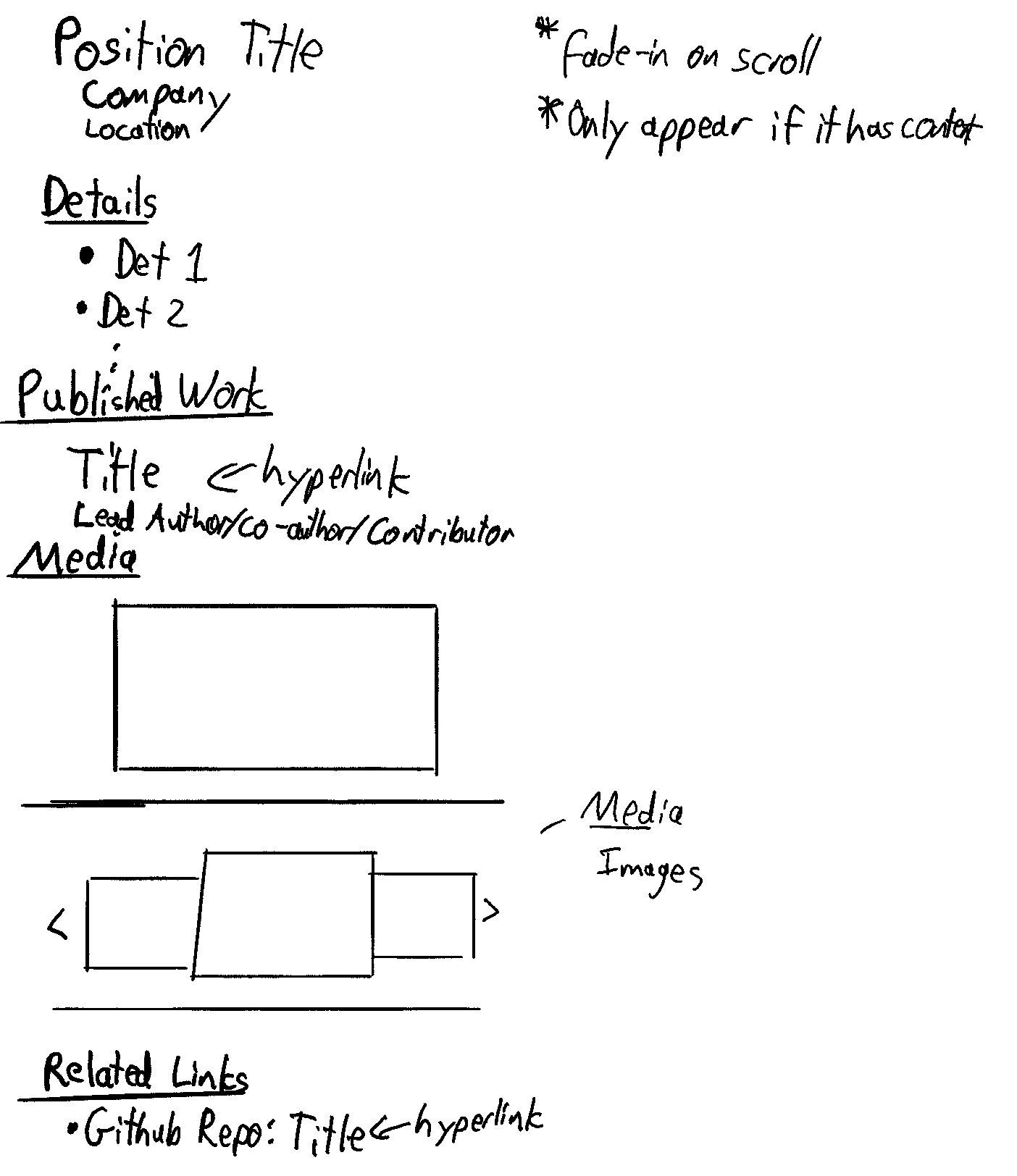
Initial Site Layout Proposal